
Introduction
LEGO Technic allows to build mechanical structures, With LEGO I'm limited by
the actuators.
Servo motors are easy to drive and interface with custom electronics.
The scope of the Unit Zero project is to build a quadruped robot using LEGO
Technic for the mechanical construction and using Servo motors and custom
electronics to power the robot.

Architecture - Electronics
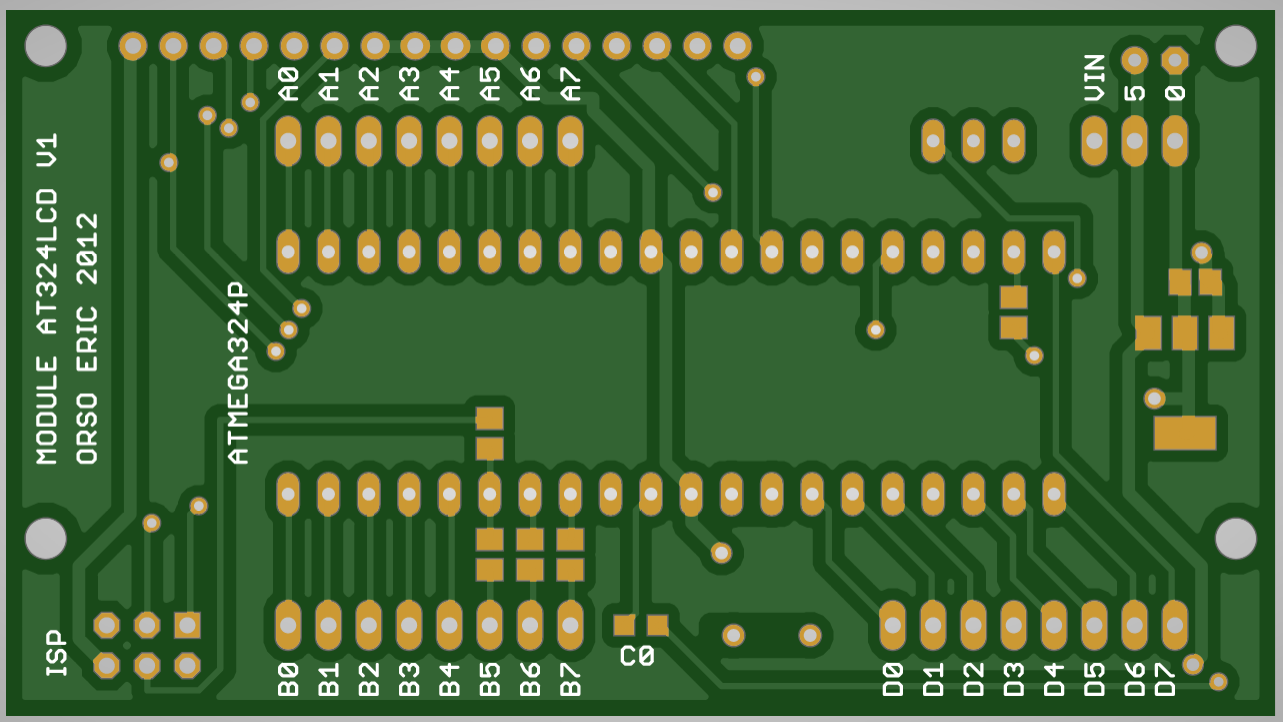
I make use of an AT324 Module with a 16x2 LCD Display for the controls.
The robot is battery powered. The 2016-11 version ran on 8XNiMH batteries. The 2017-05 version runs on a 3S LIPO battery. A regulator module takes care of generating the 5V3.0A power for the servomotors.
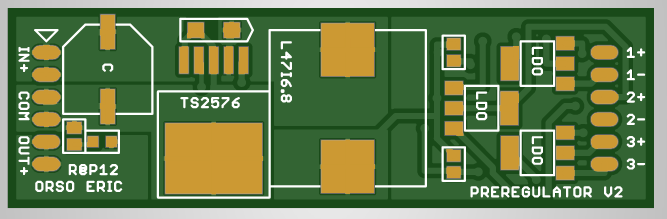
Lately I made a new regulator based on a TPS55386. I made use of Unit Zero
AT324 module, firmware and servo adapter to test the regulator under load.
Architecture - Firmware
The module uses the 16b Timer 1 to achieve high resolution and generate 8X 50Hz Servo PPM channels. The servo driver takes care of the speed limitation and orchestration of timings.
The user sets a target position and speed. In this version motion is sequenced
in a simple sequential way.
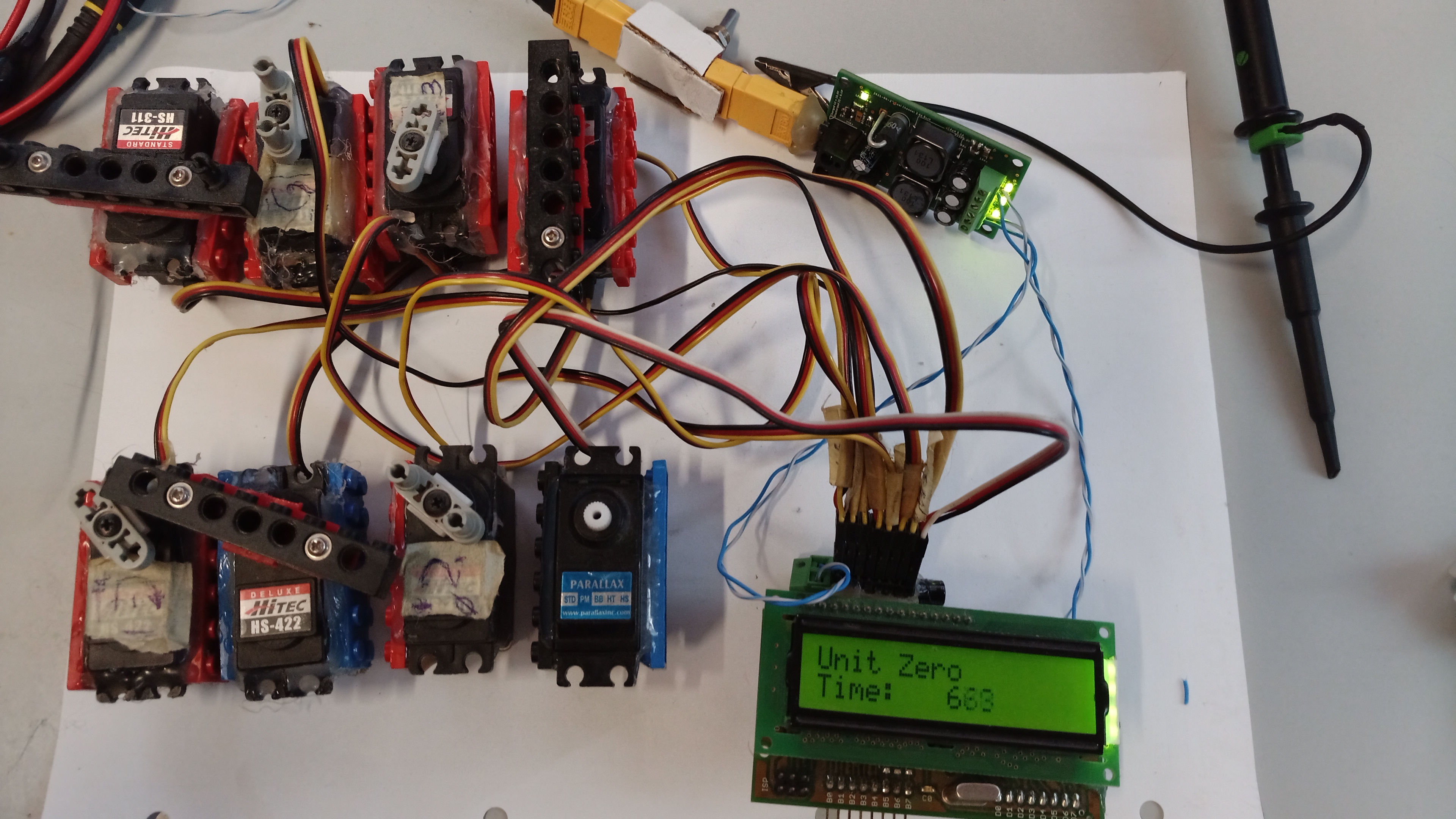
Test
Unit Zero is able to walk.
Conclusions
With this project I experimented with combining servos and LEGO to build
robots, achieving a functional robot. Servos show lo precision, and an
unreliable zero position.
Future projects should experiment with using an IMU and inverse kinematics to
try and account for servo imprecision
Future projects should experiment with servomotors with position feedback to
solve the unreliable zero position.
Useful Links:
No comments:
Post a Comment