
Robot
Speed Design
Content
1Abstract 1
2Formula 2
2.1Power 2
2.2Wheel 3
3Recap 4
4Conclusions 5
1Abstract
A robotic platform is built around the motors. It's important to design the drive system accordingly.A series of simple laws allow to compute the performance of the robot based on the mechanical specifications of the motors themselves.
2Formulae
2.1Power
A motor is a transformer that converts electrical power into torsional powerIn the electric domain, voltage [V] is the effort, current [A] is the flux. Their product is power [W]
In the torsional domain, torque [Nm] is the effort, speed [Rad/s] is the flux. Their product is power [W]

Some energy is lost in the winding, the bearings and the gears if the motor includes a reducer. this means that some input electrical power is transformed into heat. For an electric motor, a conversion efficiencies of about 60% to 90% are typical. Cheaper motors are less efficient. Motors with gearbox are much less efficient.
2.2Wheels
A wheel of some kind is used to convert torsional power into mechanical power.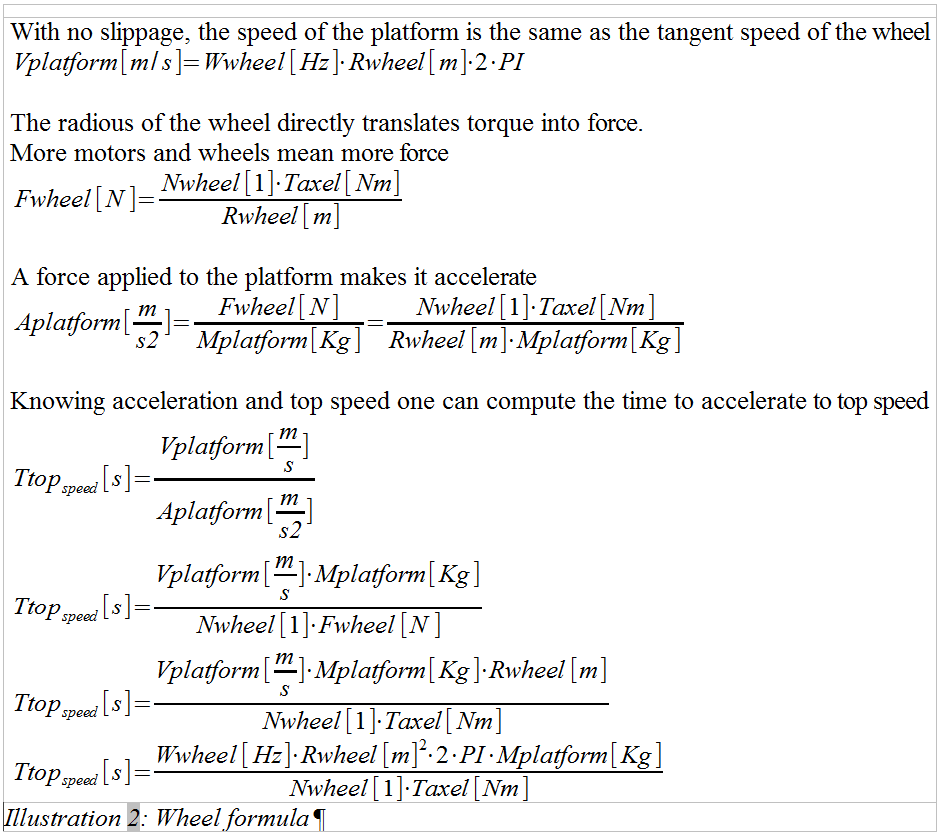
By doubling the size of the wheel:
- The top speed is doubled
- The pushing force is halved
- The time to accelerate to top speed increases four folds.
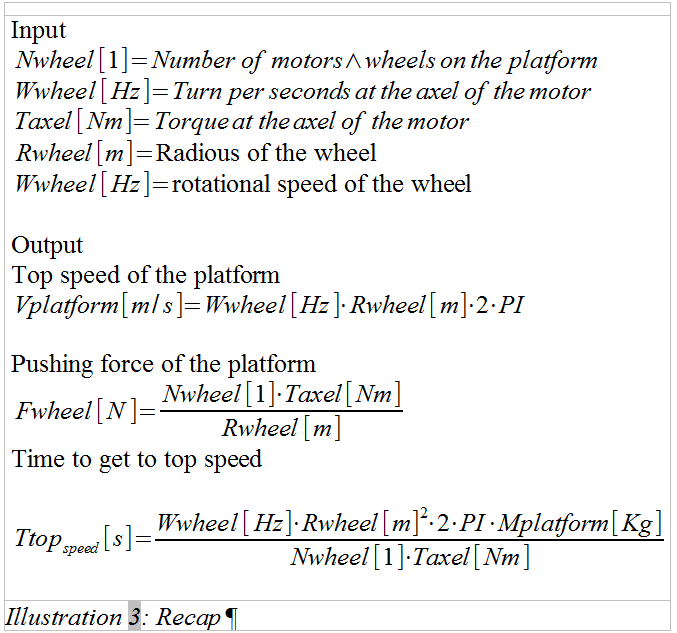
3Recap
4Conclusions
Motor manufacturer specify several parameters, all of them are at nominal voltage:- Stall torque: torque of the motor when it's in stall (zero
speed due to load. e.g. startup)
- Stall current: current that flows in the motor in stall
- No load speed: maximum speed when no load is applied to the
shaft
- No load current: current draw when the motor has finished
ramping up to the no load speed. It's due to the internal losses of
the motor like winding, bearing and gears
- Speed at peak efficiency: speed at which the motor is able to
achieve the best torque speed product (power)
By using the right combination of motor and wheel one can achieve the specified top speed and pushing power.
No comments:
Post a Comment