
Gray Dog
Problem:
Previous attempts using old style lego technic were mostly unsuccessful. A complex design is too bulky due to the lack of variety of components. New style connectors are lighter, and there is a huge variety of pieces that allows 3D connection between them using fewer overall components.Objective:
The objective of this project is to take advantage of the new style lego technic pieces to build a walker robot. For this project only default lego components are being used, no custom piece has been used unlike the previous project.Result
Video of Gray Dog V2 in action. It features power functions, ir controls, walking, and steering.Research
First was a research on walking robot built by others using lego technic. The motorized lego at-at walker seemed the best. I adapted the mechanism and improved on speed and stability.The target motion performs an elliptical motion on the XZ axis of the leg. the leg goes down and push forward, than goes up and retract forward.
Construction
A trial and error approach has been used to develop and build the robot. The construction has been done in phases, and the project advanced to the next phase only when the previous phase had been validated.Phase 1: Walking Mechanism mockup with two legs
Build two legs and a transmission prototype that seems to do the job. Difficult part was in deciding the exact length of all beams to achieve the correct motion. Phase between legs is also important. The best results are achieved if legs on the right side are in opposite phase from the left side, and if legs on the back are in opposite phase from legs on the front.90° phase rotations adds to instability.

Phase 2: Walking Mechanism mockup with two legs
Extend the mechanism to four legs and look at the physical dimension of the robot.
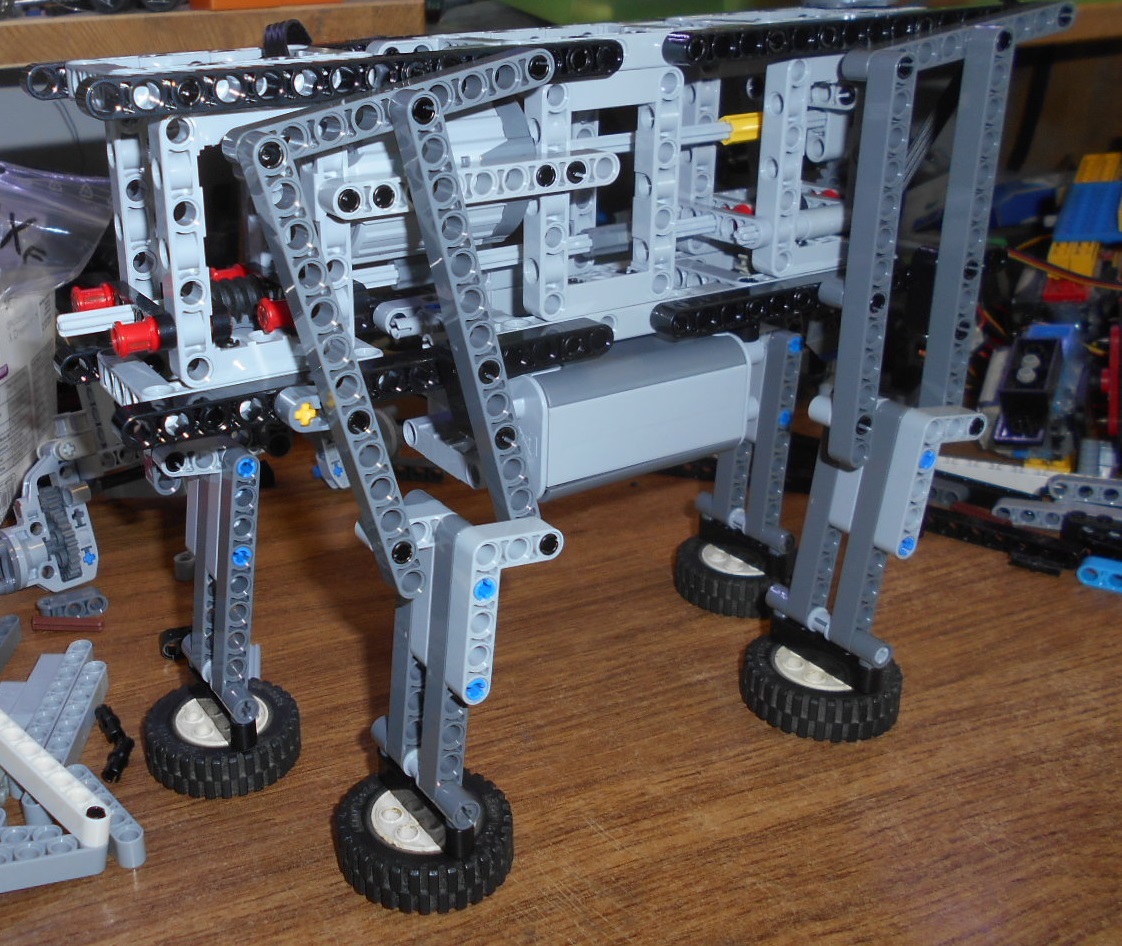
Phase 3: Add power functions and a working transmission.
In this phase the full walking mechanism was completed. Test and tune the walking cycle mechanis followed until the robot was able to walk without falling over.
Video of the full walking mechanism in action.
Phase 4: Fine tune walking mechanism
Next phase of construction is to iterate on the walking mechanism so that is stable during walk.
First things to improve was stability of foot to pivot on the X axis that caused the robot to lean.
Second improvement was the length of the beams to achieve the best stride.
Phase 5: Steering
Steering is achieved by dividing the robot in two and adding a rotation axis around Z controlled by a second motor. This phase requires a complete redesign of the superstructure of the robot.Transmission was redesigned to accomodate the XL Motor, minimize volume and improve upon the structural integrity of the assembly.

Detail of the assembled steering mechanism on the robot superstructure.

Phase 6: Complete the assembly of the robot with walking and steering mechanism
Final completed assembly of the robot with all components. IR remote control and space for the power function was added.
Phase 7: Aesthetics
Added plating and swags to Gray Dog

Conclusions
The new style lego technic connectors are a vast improvement over the old style. They can be acquired at an average rate of about 0.1€ per piece buying large sets. and about 1K pieces are needed to make meaningfully complex constructions.Future Improvements
The steering mechanism is not very effective as it also unbalances the walking cycle. The idea for a future improvement would be to somehow change the stride of the steps of the right side compared to the left while leaving the superstructure rigid and without joints while also not changing the heigt of the strides.
Stability could be massively improved by moving from a four legs to a six legs design. This way there would always be three legs down forming a triangle instead of two that can pivot around a diagonal causing instability.
No comments:
Post a Comment